<TOPIC工学部電子情報工学科> 成功も失敗も含めて ものづくりの面白さを味わおう。
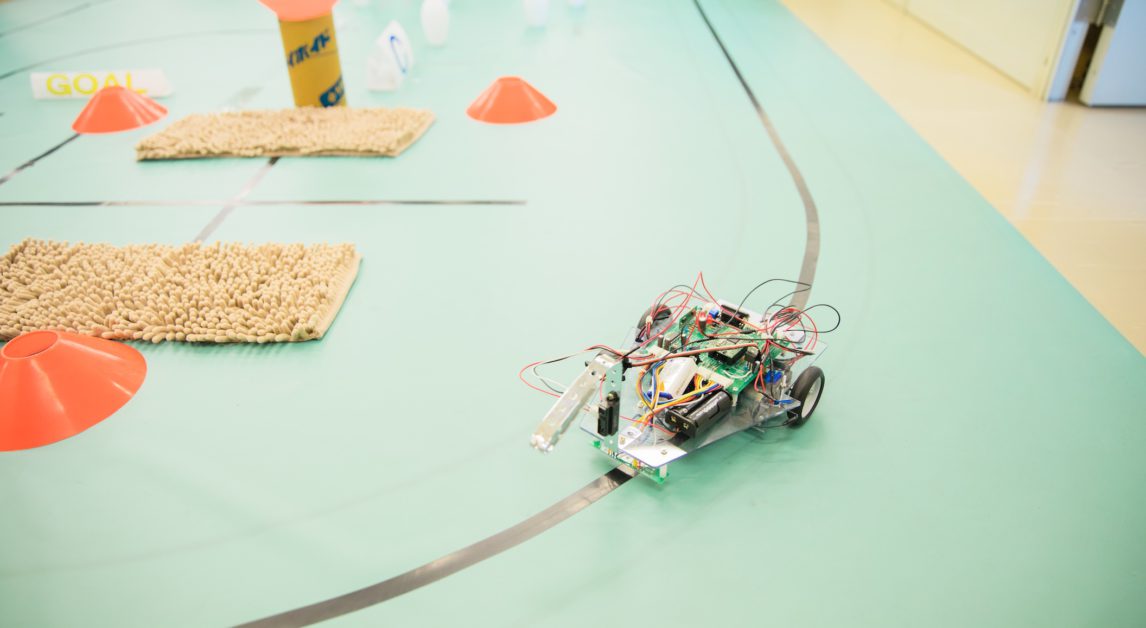
「プロジェクト実習A ・B」は、電子情報工学科3年次2学期に開講される実習科目。AはJavaによるプログラミング、Bは移動ロボットの製作・走行に取り組みます。ここでは、ハードウェアとソフトウェアの両方を体験できる「プロジェクト実習B」について紹介します。実習では、まずロボットキットを使って自律型移動ロボットを製作。次にC言語のプログラムを作成して搭載マイコン上で実行し、コースを走行させます。道内の大学生を対象としたロボット・コンテスト「ロボット・トライアスロン」の要素を取り入れた内容で、実習の最後には競技走行も実施。この科目を履修した上出さんに、感想を聞かせてもらいました。
工学部電子情報工学科4年 上出 和磨(北海道大麻高校出身)
トライアンドエラーあるのみ。
–「プロジェクト実習B」のどんなところに引かれて履修しましたか?
【上出】 小学生の頃からラジコンをつくるのに夢中になったり、ものづくりがもともと好きなんです。この実習では自分でロボットをつくれるのが楽しそうで、やってみたいと思いました。
–電子情報工学科を選んだのも、ものづくりが好きなことが理由ですか?
【上出】 そうです。ただ、もともと好きなハードウェアだけではなく、高校までまったく触れていなかったプログラミングにも興味があって、そういう道も学んでみると面白いのかなと思いました。それで、ハードウェアもソフトウェアも学べるこの学科を選びました。
–ロボットの製作はどういうふうに進めていくのか教えてください。
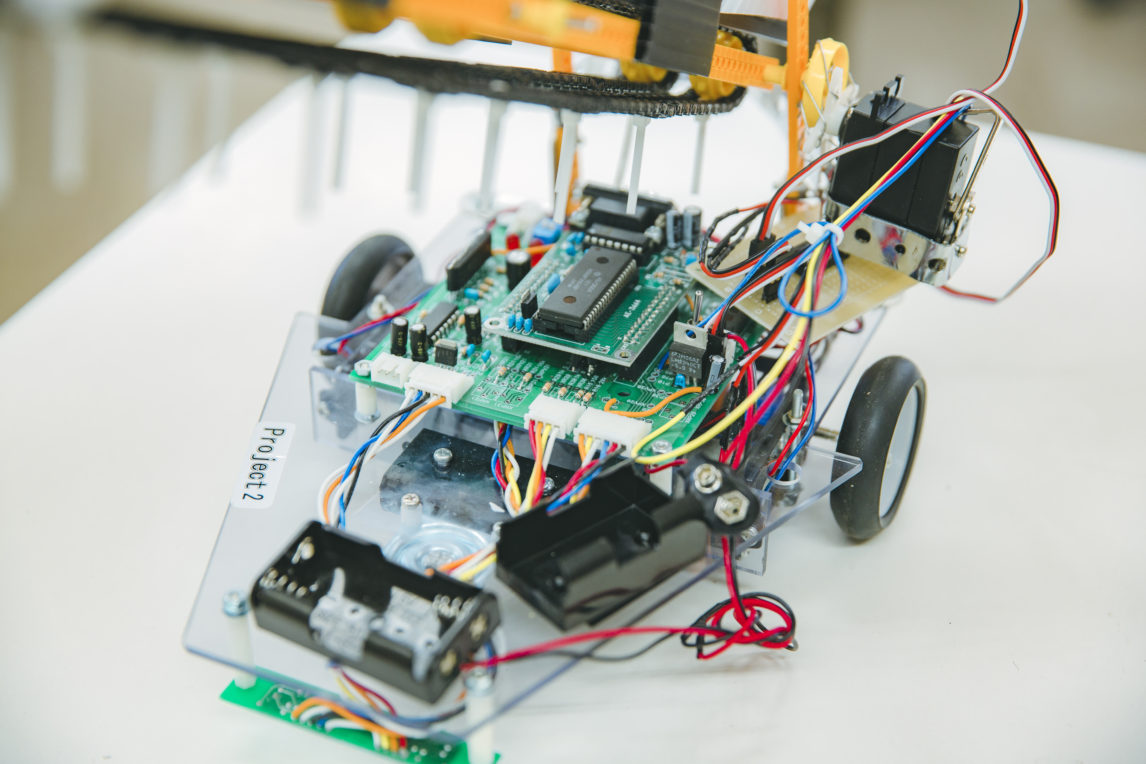
【上出】 ベースになるロボットキットがあって、全員それを利用して始めます。電子部品などをハンダ付けしたり、車体を組み立てたり、モータとセンサの配線なども。それができたら、プログラミングを徐々に進めて、実際に動くかどうかを確認していきます。最終目標の競技走行のコースには、直線と曲線のライントレースのほかに、迷路通過走行とピンポン玉を使った玉入れの種目があるので、玉入れ機構をどういうふうに作るかもチームごとに一から考えて、形にしていきます。僕たちのチームは2人で、僕がものづくりの部分を担当し、友達がプログラム関連を全部やってくれました。
–玉入れ機構はどんなところから発想したんですか?
【上出】 これまでに先輩たちが作った未完成の車体なども残っているので、その中にあった方式を参考にしました。ベルトコンベアのような方式でピンポン玉が回り、狙った入れ物に落とすんですが、それがシンプルで一番楽に動かせるんじゃないかなと思いました。玉入れの入れ物は高さが2種類あり、単に上から落とすだけでは精度が上がらないので、高さを上下させられるようにするとなると、この方式がいいかなと。そう決めたら、あとは一気につくり上げられました。材料にはプラ板を使っているのですが、重さをどれぐらいにするかもポイントで、僕たちのは比較的重たい方なんです。それを車体に付けると上の部分がどうしても重たくなるので、走っている時に揺れてしまって、速度を上げるとライントレースから外れてしまうことがありました。ですから、速度を上げる点においては軽い方が有利なんですが、玉入れの精度を高めることを考えると、玉入れ機構そのものをしっかりしたつくりにする必要がありますから、ある程度重くなってしまうんです。競技走行で勝つための考え方はチームごとに違って、速度重視のチームもあれば、精度重視のチームもあります。そんな中、僕たちは速度も、玉入れの精度も、どちらもギリギリまで攻めることができるロボットの製作を目指し、完成させました。
–走らせてみるごとに、改善点が見つかる感じですか?
【上出】 そうです。走らせてみると、失敗するか成功するかがすぐ分かるので、本体が完成してからは調整に時間をかけていきます。速度をちまちまと変えてみたり、何度もトライアンドエラーしながら。動かすたびに友達と話し合って、プログラムも調整してもらいました。

ハードとソフトの知識を集めて。
–この実習は、どんなところが魅力だと思いますか?
【上出】 本当に楽しいんですよ。ものづくりが好きな人だったら、楽しいと思いますね。ハンダ付けをしたりしてつくっていくこと自体も面白いですし、車体の上に付ける玉入れ機構は一からの発想なので、自分で創造してつくり上げていくのは特に面白いと思います。難しかったのは、故障の原因がハードなのかソフトなのかを見極めるところ。実習担当の高氏秀則先生には、トラブルの時にはそこを切り分けて考えることが大事だとアドバイスしていただきました。ほんの少し調整しただけで、それまで動いていたのに急に動かなくなったりすることがよくあるんです。プログラムかなと思っていたら、例えばネジの留め具合が原因だったりする。走っているうちにネジがだんだん緩んできて、それでうまく動かなくなっていたことがあったのですが、その原因を突き止めるまでに僕たちは2日ぐらいつぶしました。なんで、なんで、と。でも振り返ると、そういうことも全部含めて面白かったです。トラブルの原因を突き止めて動き出すとうれしいし、もっと速度を上げたい、もっと精度を高めたいと攻めたくなりました。
–試行錯誤があったとはいえ、上出さんチームは完成度が高かったそうですね。そのポイントは?
【上出】 役割分担じゃないですかね。プログラムとハード系と、互いに自分の担当はしっかりやりつつ、話し合いながら助言したり、手伝ったり。それと、単純な機構にしたのも良かったのかもしれません。ほかのチームを見ると、いろいろ考えて凝ったものが多かった気がします。それで、動作が難しくなったのかも。僕たちの基本的なコンセプトは、玉入れができて完走できていたらいいというシンプルなところだったので (笑)。


–ちなみに4年次に高氏研究室に所属したのは、先生がこの実習の担当だった影響もありますか?
【上出】 はい。実習を通して、高氏先生の研究室ではロボットビジョンなどの研究をテーマにしていて、ハード系のこともできると分かったので、研究室を希望する時の参考になりました。研究室に所属後、オープンキャンパスの手伝いをした時には、研究室紹介の一環としてマニピュレータで除菌シートをつかみ、参加者に渡すデモンストレーションを担当。自分がさせたい動作をプログラムして、マニピュレータを操作しました。卒業研究も、マニピュレータに新たな動きをさせることをテーマにして取り組みました。就職はIT系の企業に内定し、プログラムに携わることになっています。自分は技術職の方が向いているかなと思いますし、この学科で学んできたことを仕事に活用していければと考えています。

–例年、高氏研究室では4年次に「ロボット·トライアスロン」に参加しているんですよね。
【上出】 そうなんです。ただ、2021年度は新型コロナウイルスの感染拡大でオンライン開催になり、僕たちは参加しませんでした。通常の形でロボトラが開催されていたら、出てみたかったですね。正直に言うと、ここまでしっかりしたものを自分たちがつくれるとは思っていなかったので(笑)。参加して、自分たちのロボットの力も試したかったし、ほかの大学のチームがどんなものを作っているのかも見たかったですね。これからこの実習を履修する皆さんには、ロボトラが再開されたら、ぜひ参加してみてほしいです。
関連記事






新着記事
-

<WORLD>日本とカナダ、カナダと日本。 「グローバル」の本当の意味について考える。
トロントメトロポリタン大学職員卒業生 特集 -

<JAPAN>日本の真ん中で、日本中・世界中とつながる
ラグジュアリーブランド卒業生 特集 -

<HOKKAIDO>北海道にしかない魅力を、日本に・世界に発信
中川町町役場卒業生 特集 -

地域研修を通して SDGsが自分事に
経済学部1部地域経済学科2年地域経済学科 -

<勤務先/寒地土木研究所> 道路や港湾を維持管理して 生まれ育った北海道を支える仕事。
経済学部1部 経済学科卒業生 経済学科 -
<勤務先/NTT東日本-北海道>未来の当たり前を創り出す仕事。 それが、私たちのやりがい。
経営学部1部 経営情報学科卒業生 経営情報学科
